di Chris
Chapman
traduzione in italiano di Mauro
Mariotti
11 June 2002
|
di Chris
Chapman
|
11 June 2002 |
|
|
Ho fatto alcuni esperimenti usando dei magneti NeBFe e dei sensori lineare ad effetto Hall per costruire un sensore lineare di posizione semplice ed economico adatto ad essere usato in un sismometro a pendolo o di tipo a retroazione (force-feedback).
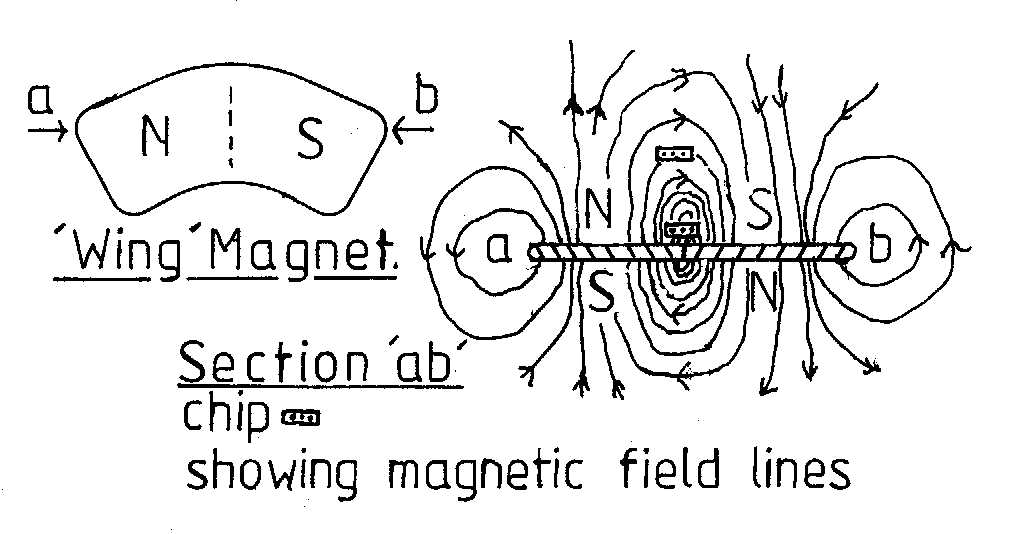
I magneti sono lunghi circa 36 mm, larghi 20 e dello spessore di 2,5 millimetri. Potete vedere la foto e la descrizione al sito http://www.wondermagnet.com/dev/magnet2.html.
Questi magneti a forma di "aletta" sono recuperati anche da vecchi hard disk guasti. (Servono al movimento del braccio che posiziona le testine di lettura).
Il materiale è magnetizzato
in modo che ogni faccia abbia un lato dell'ala avente il polo NORD e l'altra
ala (o metà del magnete) il polo SUD.
La linea dove i poli N e S si congiungono
sulla superficie è costituita da una giunzione magnetica estremamente
sottile.
Il chip ad effetto Hall sarà
posizionato alla giusta altezza dalla superficie del magnete, come nella
figura, nella posizione che darà la massima sensibilità con
la massima estensione di lettura.
I sensori ad effetto Hall hanno un
elemento di Hall, una alimentazione ed un amplificatore a basso rumore
tutto nello stesso chip.
Vedi http://www.allegromicro.com/sf/3515/index.htm.
Potete acquistare questi sensori realizzati in involucri di plastica piccoli
e piatti a tre piedini, simili alla serie di transistori BD.
Vedi la lista dei rivenditori della
Allegro all'indirizzo:
http://www.allegromicro.com/salesloc/sal2nam.htm.
I sensori ad effetto Hall necessitano di una alimentazione tra 4.5 e 5.5 Volts stabile ed a basso rumore. Essi forniscono in uscita una segnale proporzionale e quasi sempre "rail to rail" cioè da zero alla tensione di alimentazione.
La linearità si degrada leggermente entro 0.5V dai limiti di alimentazione ma questo non è limitante nella pratica. Questi dispositivi hanno tre piedini, il +Ve, la massa e l'uscita del segnale che è normalmente a metà della tensione di alimentazione in assenza di campo magnetico.
L'uscita è affetta da una componente di rumore rilevante ed è necessario un filtraggio a 10Hz o anche meno per l'uso in sistemi sismometrici.
In pratica il componente verrà assemblato parallelo alla faccia del magnete ad una certa distanza dalla sua superfice. Ho usato mezzo millimetro di spaziatura in alcuni esperimenti e questo tiene (considerando anche l'involucro) circa un millimetro di distanza dal chip alla superficie del magnete. Si può scegliere di tenere in movimento il chip e avere solidale al suolo il magnete o viceversa.
Come la posizione relativa del chip rispetto al magnete cambia, la tensione in uscita dal chip cambia in modo proporzionale al flusso magnetico sulla perpendicolare del chip. Questo da una sensibilità ragguardevolmente alta lungo una linea di calibrazione sostanzialmente diritta come si vede nel grafico che segue.
La sensibilità e l'intervallo
di spostamento possono essere controllati regolando la distanza tra il
sensore e la superficie del magnete, più grande e la distanza minore
sarà la sensibilità ma la gamma di lettura lineare sarà
maggiore. Si tenga presente che questi chip hanno un limite di flusso magnetico
rilevabile che porta la lettura a fondo scala.
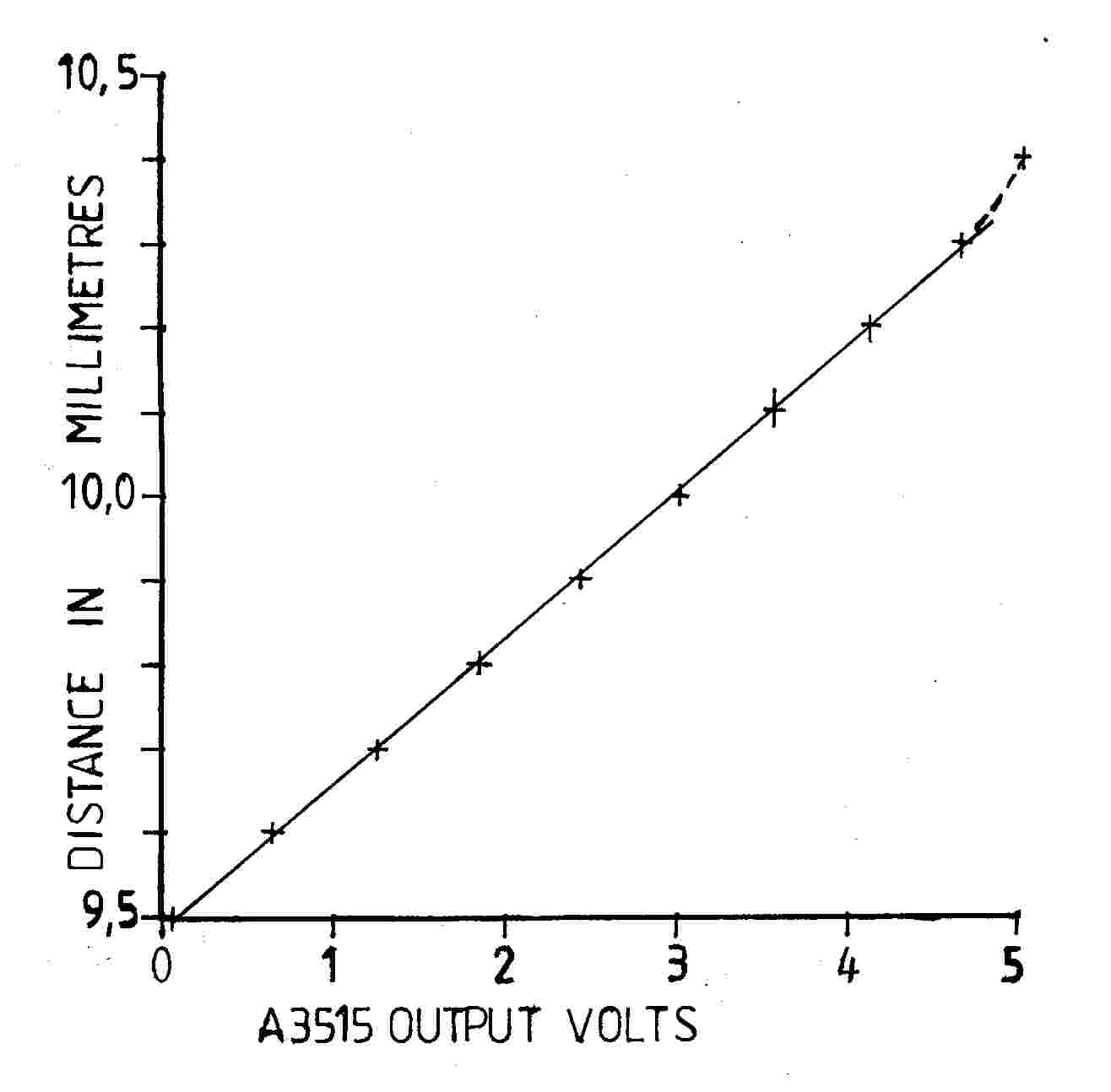
Il diagramma mostra la tensione d'uscita assoluta contro la posizione del sensore. La sensibilità misurata è di 5.8mV per micron con un range lineare totale di 0.8 mm. (nel grafico da 9.5cm a 10.3cm circa).
Il segnale può essere adeguatamente
amplificato, filtrato e riferito a zero volts generando quindi un segnale
d'uscita in continua. Il segnale sarà poi fatto passare attraverso
un filtro passa alto per eliminare qualsiasi deriva a bassa frequenza e
un secondo stadio di amplificazione e filtro può scalare il segnale
in modo adeguato per il convertitore A/D che si desidera usare.
L'uscita può essere usata
per pilotare il feedback di un amplificatore di un sensore Shlakenford-Gundersen
o di un larga banda. La componente continua può anche essere usata
per un sistema sismometrico a "larga banda" di tipo feedback a tre componenti.
Il minimo movimento che può
essere misurato (la risoluzione) dipende dalla sensibilità e dal
livello di rumore presente nel segnale d'uscita. Con un filtro a 3 poli
Butterworth, ho misurato un livello di rumore minore di +/- 100 microvolts
picco-picco, con oltre 100 secondi di periodo. Con una sensibilità
di 5.8mV/micron, questo corrisponde a poco meno che +/-20 nanometri e un
range lineare di 0.8mm. Se si incrementa la sensibilità a 10mV/micron,
si possono raggiungere i +/-10 nanometri di risoluzione ma si avrà
circa la metà dello spazio lineare di lettura di circa 0.5mm.
Questo è buono per uno strumento
di tipo feedback (retroazionato) dove il sistema di retroazione mantiene
il pendolo praticamente sempre nella stessa posizione, ma un piccolo terremoto
manderà sicuramente fuori scala un sistema non retroazionato con
una sensibilità così spinta. Inoltre sarebbe necessaria notevole
cura per la messa a punto.
Se verrà assemblato un magnete bipolare a "U" o "I" senza schermatura di un normale sistema a pendolo tipo magnete/bobina, questo potrebbe essere sottoposto a forze causate da cambiamenti del campo magnetico locle o muovere il pendolo di conseguenza. E' probabile che abbiate già visto questo tipo di rumore e interferenze. Questi alterazioni del campo magnetico possono essere causate dalle variazioni di campo dello stesso pianeta terra in se o anche influenzati dal passaggo di treni, autocarri e automobili nonchè da apparecchi elettrici. Questa sensibilità è fortemente ridotta da magneti a quattro poli dato che i poli sono vicinissimi l'uno all'altro e sono accoppiati. Quando un polo è sottoposto ad una piccola spinta da un campo esterno, il polo adiacente solo a qualche millimetro sarà sottoposto alla stessa forza e controbilancerà la variazione cancellando il rumore.
Il campo magnetico può essere schermato usando un foglio di acciaio dolce piegato ad "U".
Questo schermo può anche essere
usato per contollare la sensibilità totale del sensore regolando
la distanza tra il magnete e la superficie dello schermo. Assemblando un
magnete schermato al pendolo si avrà il vantaggio che il pendolo
non avrà i fili che dovrebbe avere se sulla sua estremità
si trovasse il chip del sensore ad effetto Hall.
Questo aiuta a ridurre anche il
rumore in RF ed elettromagnetico che potrebbe essere captato da cablaggio.
La forza del magnete, la sensibilità
del sensore Halle il loro posizionamento all'interno del campo magnetico
influenzeranno la calibrazione del segnale in uscita. Potrete calibrare
ragionevolmente il sistema incollando una pallina di 3 mm di diametro ad
un lato del pendolo e avvitando una vite da un lato dell'involucro del
pendolo in modo che la vite vada a contatto con la pallina. Collegare un
voltmetro digitale tra il pin d'uscita del sensore e il negativo.
Usano le viti di livellamento si
inclina il sismometro fino a che il pendolo non fa toccare la pallina alla
vite di arresto. Adesso si può leggere il valore usando il voltmetro.
Quindi si può inserire tra la pallina e la vite di arresto un piccolo
foglio di metallo di uno spessore conosciuto e quindi leggere nuovamente
il valore sul voltmetro. Dividendo la differenza di tensione tra la prima
e la seconda lettura e lo spessore del foglio metallico si può avere
la sensibilità dello strumento con una tolleranza di circa il 5%.
Questi esperimenti sono basati anche
sul grosso lavoro compiuto da Meredith e Robert Lamb, che ringrazio sentitamente
per i loro suggerimenti e aiuto.
Vedi http://www.geocities.com/meredithlamb/index.html